Program your robot in minutes.
Why EasyROS
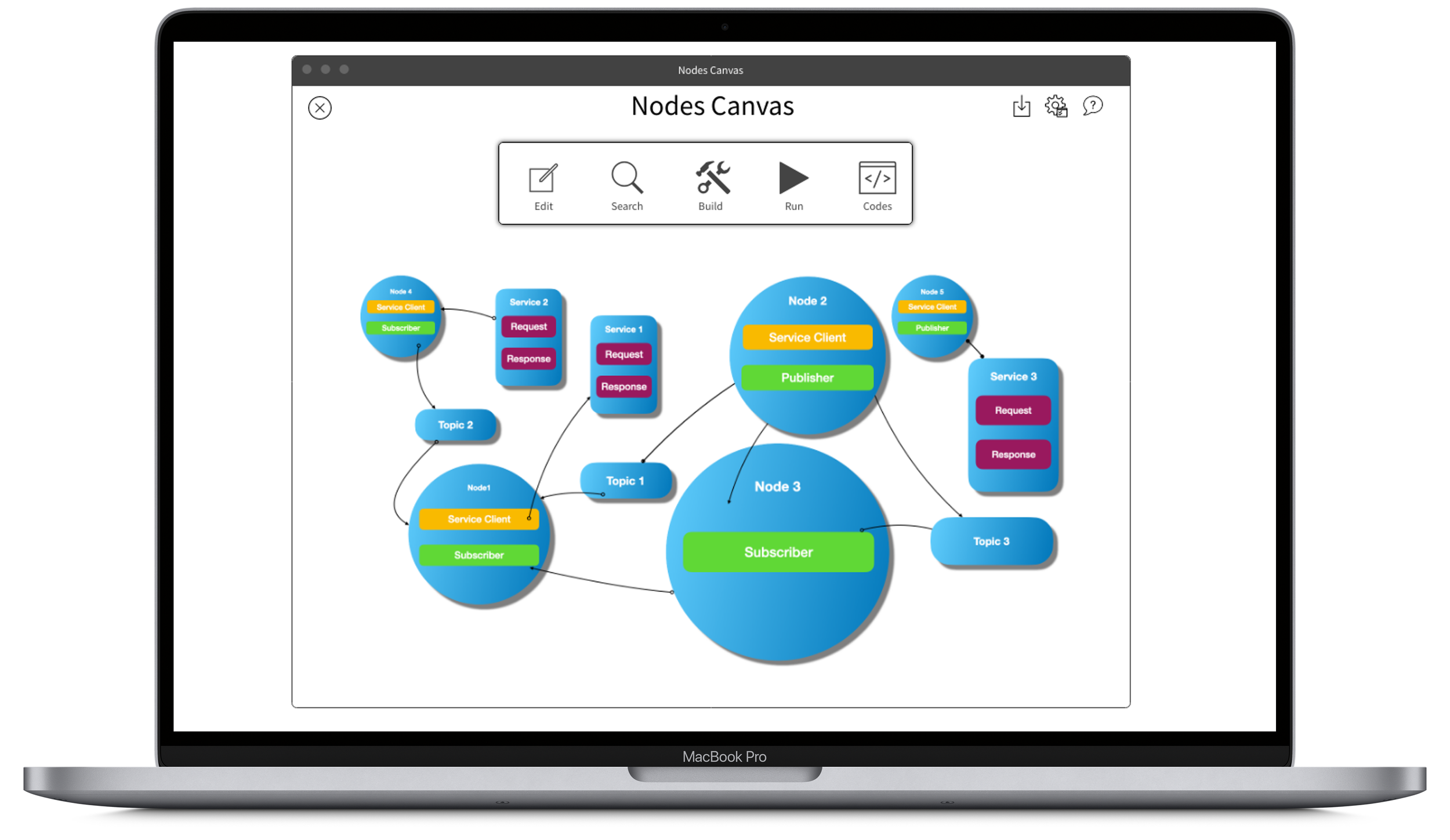
EasyROS enables you program your robot in minutes by dragging and dropping ROS Nodes, Topics, Services and Actions. It saves time from manual ROS configurations. It allows you work on any computing devices through a web browser. Your codes can be exported to a local IDE on your computer easily.
EasyROS is based on the latest ROS 2 release for better forward compatibility. Please feel free to click on the Contact link to tell us what ROS release you wish to include. We are planning to expand more supports to other ROS releases in the near future.
EasyROS Beta allows our pioneer users to quickly create, edit and configure Nodes, Topics, Services and Actions in the Nodes Canvas. You can export the codes generated by the Nodes Canvas to your local Download Folder for further compiling and debugging. Some of the buttons are not functioning in the Beta version. Our engineers are working hard to bring them live in the next few months. Please stay tuned!
Please note EasyROS beta is only working on supportive web browsers on computers at the moment.




Let’s Code, Build and Share!
With EasyROS, we believe a new age of Robotic Computing has started. Our goal is to empower more ROS programmers to code, build and share their knowledge and skills much quicker to advance the science of human robot interactions to the next level. If you have any crazy ideas or comments to share, please contact us.